解决传统难题 开创技术新路
在海底观测领域,已有大量关于传统水下机器人构型(AUV、ROV)的研究工作,同时也有诸多轮式和腿式机器人的探索。然而现有技术方案仍存在明显局限性。轮式和腿式机器人在面对崎岖地形时,往往受到障碍物和倾斜表面的限制,严重影响其性能发挥。而悬浮式机器人虽然具有较强的复杂地形通过能力,但在近海底运动与作业时,尤其是上升过程中,容易引起沉积物扰动,导致泥沙再悬浮,降低观测能见度。这些问题凸显了目前水下机器人方案的不足。 基于对这些技术难题的深入研究,王刚教授团队经过持续攻关,成功开发出具有创新性的MUV系统。该系统通过独特的构型设计、先进的环境感知技术和精准的运动控制方法,成功克服了传统水下机器人难以兼顾机动性和环境低扰动的技术瓶颈。在南海实地海试中,团队全面验证了相关理论与方法的有效性,使近海底环境观测距离达到了厘米级别。
MUV三大创新突破详解
1.提高MUV对于海底环境的适应性
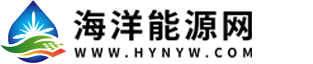
针对传统水下机器人在近海底运动时导致泥沙再悬浮的问题,研究团队提出了创新性的MUV构型方案。该方案采用工程化设计思路,通过独特的推进装置构型设计,成功优化了机器人上升时的尾流分布特性,最大程度降低了对底部沉积物的扰动。这种设计在保持卓越运动性能的同时,实现了在海底复杂地形中的高效运动和精准观察能力。
2.提升MUV对于外界干扰的感知能力
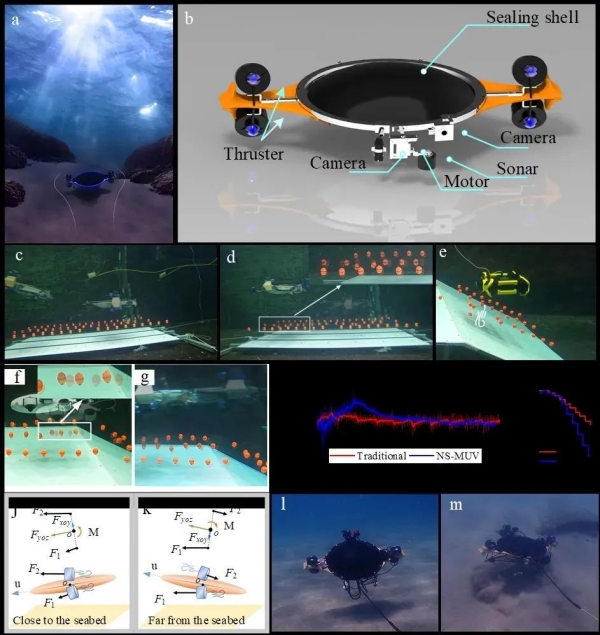
在近海底运动过程中,MUV的整体稳定性至关重要,特别是当与海底距离极近时,即使是瞬时的失稳也可能导致触底事故,造成任务失败或设备损坏。为确保MUV的稳定性,研究团队采用了精确的模型辨识技术,全面获取敏捷水下机器人的动态特性。这使得MUV能够在复杂的流场环境中,准确识别流场对其运动趋势的影响。
同时,团队构建了低噪声的角加速度反馈系统,实现了对MUV所受外界干扰的实时监测。经过严格的试验验证,该系统能够有效应对相当于MUV自身重量30%的重物下坠所产生的瞬时冲击干扰,有力保证了MUV在近海底环境中的运动稳定性。通过这些技术措施的综合应用,研制的MUV样机展现出敏锐的外界干扰感知能力和快速调整能力,确保了其在复杂多变的海底环境中保持稳定运行,显著提升了水下机器人近海底运动的安全性和可靠性。
3.提高MUV对于海底复杂地形的适配性
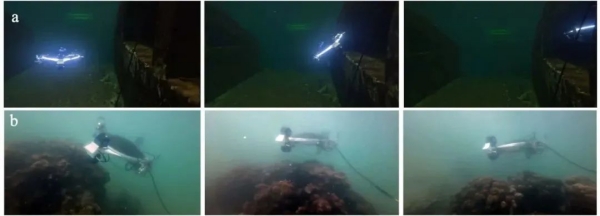
针对MUV的特殊构型特点,研究团队开发了一种创新性的考虑姿态限制的轨迹跟踪算法。该算法充分利用MUV的全姿态控制能力,使其能够在复杂地形中灵活调整自身姿态,更好地适应各类地形变化。例如,在通过狭窄缝隙和崎岖地形时,MUV可以通过精确调整旋转姿态角,确保顺利通过,为海底探测工作提供了极大便利,有效提升了在复杂海底环境中的作业能力。