一、水下运维无人装备
水下机器人,可以在恶劣环境下工作,比起潜水员有大得多的下潜深度和水下工作时长。领航员通常在钻井平台或作业母船上控制水下机器人,利用操纵杆和各类传感器、摄像头控制水下的航行与作业。在良好的天气条件下,合理安排足够的人力资源,ROV可以进行一天24小时不间断的工作。水下机器人分为两类,有缆遥控水下机器人(ROV) 和自主水下机器人(AUV)。
1.ROV(无人遥控潜水器)
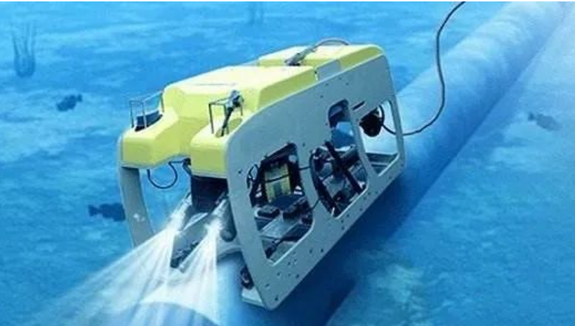
ROV,有缆线,搭载光学、声学、水质类传感器对桩基、冲刷及电缆进行系统检测与探摸,可以在突发事件中快速响应,长时间水下作业,快速高效完成水下检测。
1)系统构成: 一套完整的ROV系统包括甲板控制舱,A形架、绞车以及液压动力单元组成的布放回收系统,通过脐带缆与水下中继器TMS和ROV相连接,脐带缆除承载动力电源和信号的传输。 检测型ROV会配置侧扫声纳、浅地层剖面仪等声学设备,根据需要也可以配置管缆探测器;作业型ROV会配置机器臂。
2)应用场景: 一是水下检测。利用声呐和视频监控能完成包括风电桩基(沁水构件)检测、牺牲阳极检测、冲刷腐蚀检测在内的多种检测任务,检测出管桩及其周围有腐蚀和冲刷情况,为后续故障分析及解决方案提供有力的数据图像支持;对海缆进行监测,确认海缆是否存在断裂以及确定位置等问题,对发现问题的地方进行定位,并进行驻足观测,为之后维修提供科学依据。二是水下作业。ROV能下潜至水面下几百米,它们不受压力和寒冷等因素的干扰,可以全天候的作业。在海缆修复操作中,ROV可以携带特质吊带后进入深水区,并行至故障位置以后,利用机械手抓住将海缆拉出水面,在海缆修复完成后再送至水下。
3)作业限制条件: 恶劣的天气是影响ROV作业的主要限制因素,一般ROV系统的设计为在4-5级海况下可以正常作业,6级海况下可安全回收,这是行业公认的作业准则,特别是海上风电领域,水深都比较浅,风浪流状况复杂。故而在实际作业过程中,鲜有在5级海况下进行ROV布放下水的情况,作业方往往更多选择在海况较好的时机下开展ROV作业。
4)技术难点: 海下地形复杂,流速大,波浪大,潮汐变化大,对水下机器人的抗流能力要求较高对水下机器人的搭载能力要求较高;在风电桩基的狭小空间进行作业,对水下机器人的体积要求也很高 。所以强动力、大搭载能力,小体积的水下机器人更适合于风电场应用,而这三个要求有相互矛盾之处,因此对于水下机器人的设计和技术要求很高。
2.AUV(自主水下航行器)

AUV无线缆自带能源,脱离与作业母船的物理连接,作业范围更广、自主性好、灵活性强、体积小、质量轻、活动范围广及隐蔽性好等优点,可以深海作业,组网观测(对多个AUV同时发布作业任务)。
1)工作原理: 由母船搭载AUV到达预定下潜海域,母船布放AUV时校准自身位置,为AUV提供定位信息,同时,下潜过程中不断进行定位校准和通信,到达预定深度后,调整航向和姿态,出发作业,最后根据导航系统上浮回航,获取数据。
2)和ROV比较: AUV没有线缆,通常配置有一个主推进器,与传统的框架式工作级ROV对比,它的航行效率非常高。AUV可以预先编程,独立于主船或控制站,领航员可随时读取监测记录的数据,AUV还可以在监督模式下工作,从领航员那里获取更新的位置,在执行任务期间可以进行自主导航和路径规划。
3)技术难点: 水下导航是实现AUV自主巡航的关键技术,国内尚不成熟,所以出现容易丢失的情形。国外对于AUV的研究较早且成熟,在研究一种无需辅助船只就能水下独立工作的AUV系统,通过设计一个AUV专用对接点来代替原来的作业母船,AUV直接在对接点进行充电、数据上传和指令下载工作,可大大降低运维成本。
3.水下机器人在海缆检测、维修的应用探索
可以组合AUV与ROV共同用于海缆巡检,首先可使用AUV对海缆布设区域进行扫测,找到光缆断点位置。与此同时,AUV将无线信号收发器放置光缆断点位置,以便后续维修时连接使用。通过信号收发器提供的位置,将光缆另一端打捞出水。在工作母船上,用相应装置连接光缆两端,使用近端登陆站信号进行检测,确定光缆故障端。切除故障部分,进行重新接通,进行信号测试,通讯正常后,按程序进行水下重新布设。
PART.2
二、水上运维无人装备
1.无人船
无人船是集合无人机和水下机器人巡检的载体,将“无人机 +无人船”融合成一体化装备,是集海上救援与海域探测、监测为一体的重要平台,有效降低人员乘船携带相应巡检设备到现场进行作业的次数,从而节约成本并节能减排。
1)工作原理: 该项目将建成以无人船作为母船,配置数量众多的微小型无人机群的系统,可实现无人机群的起降、存储、充电,并通过卫星通信将数据传输到岸上指挥中心。该系统由无人船搭载无人机群,以自主航行的模式进入海上风电场,利用5C和卫星通信与控制系统连接,自主控制无人机群自动检查风力涡轮机,从而无需手动控制和人工检查。
2)技术难点: 国内采用的无人机、无人船巡检解决方案,初步实现了自动化、智能化,但是仍然需要人员携带设备乘维修船到现场进行巡检,出海时间和 巡检时间受海上窗口期限制,但无人船的自主回舱、回舱后如何在海水环境下安全充电、海上巡检采集的大量数据如何保证实时传输以及对数据进行自动化快速处理等技术有待进一步研究。
2.海上风电叶片运维机器人

国外专门设计了一种六足履带式爬行机器人,主要为维护和检查海上风机叶片,已经成功通过涡轮机行走测试,有望成为未来海上风机叶片维护的生力军。该机器人工作时搭载“辅助系绳”,它可以延长机器人在海上作业时间,并能快速的在叶片上布置和回收。该机器人利用真空粘合技术,可保持自身稳定性和灵巧性,使步态适应各种叶片曲面。
在海洋环境中对风场进行维护一直以来都是行业的挑战。一系列智能机器人替代人工开展海上风电维护,将降低人员安全风险和运维成本,真正实现海上风电数字化和智能化运维。