数字孪生是一种旨在精确反应物理对象的虚拟模型,利用随时间变化的传感器数据模拟物理模型。在用于协作现代社会的自主机器人网络(Autonomous Robotic Networks to Help Modern Societies,ARCGES)中每个海洋观测系统都有相应的数字孪生体和它的原型物理孪生体。数字孪生体连接仿真的硬件组件,物理孪生体连接真实的传感器,并将数据同步给它的数字孪生体。ARCGES的软件框架在如图1所示。每一个节点都被封装在Docker中,物理孪生侧与传感器等真实的硬件相连,数字孪生侧模拟相同的硬件组件。在该网络中,真实硬件与模拟硬件可以混用。
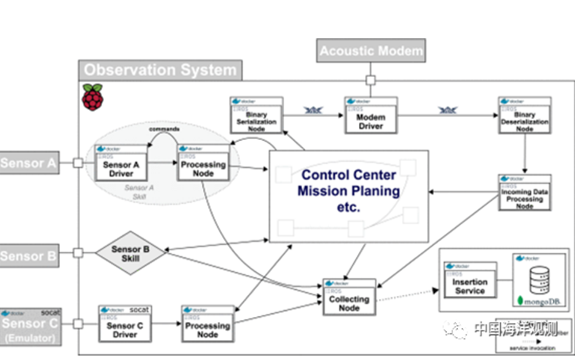
图1 数字孪生的网络架构
通讯
系统采用“即时通讯”(instant messages,IM)进行数据传输。如图2所示,在ARCHES中每个数字孪生体都与基站相连。基站将物理孪生体的信息分发给相应的数字孪生体。
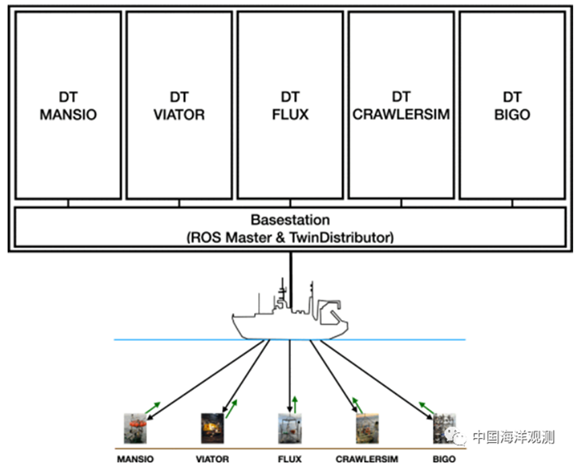
图2 数字孪生的通讯架构
现场实验
研究者评估了如图3所示的四种应用场景:(a)将环境数据与数字孪生体同步,(b)将行为与物理孪生体同步,(c)将研究船的命令发送给各孪生体,(d)当一个数字孪生体检测到特定事件后,由物理孪生体将它发送给其他孪生体。
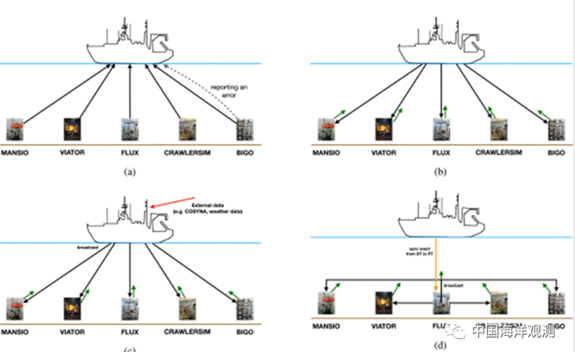
图3 ARCHES演示任务中评估的场景
结论
研究者对每一种场景都进行了成功评估。数字孪生方法有助于海洋观测系统的开发、测试和技术验证 。不同于在研究船上检测和操作海洋观测系统,数字孪生系统可以模拟不同的控制指令和应用场景,当指令发生错误时有助于更快的检测到错误的原因和位置 。此外,该方法允许进行嵌入式软件测试 ,助力海洋观测系统开发。在预测性维护 方面,数字孪生能够检测物理孪生的硬件性能和状况,有助于系统的故障检测。不同于传统的研究巡航获取海洋观测系统观测数据的方法,使用数据孪生能够让科学家和技术人员在世界的任何地方更廉价的获取监测数据并操作海洋观测系统。