
图源:FET
ICE Unity系统具备多项创新特性,包括现代化的用户界面,支持物理按钮与触屏双操作模式;统一的用户界面可适用于不同类型的ROV,极大降低了操作人员的培训成本;此外,系统具备强大的网络连接能力,支持远程操作、调查数据实时流传输以及系统状态实时监控。
网络连接功能的强化不仅实现了远程运维,还为机器学习、预测性维护、远程技术支持与系统更新提供了可能。FET海底业务副总裁Kevin Taylor表示:“ICE Unity将创新与无缝协作融为一体,是ROV控制领域的一次革命性进步。通过实现核心系统之外的远程操作,该系统能够大幅节省时间与成本。”
他进一步指出:“其中一个重要优势是能够远程监控设备性能,并在需要时更换部件,而非依赖固定的维护周期,从而有效减少停机时间。”
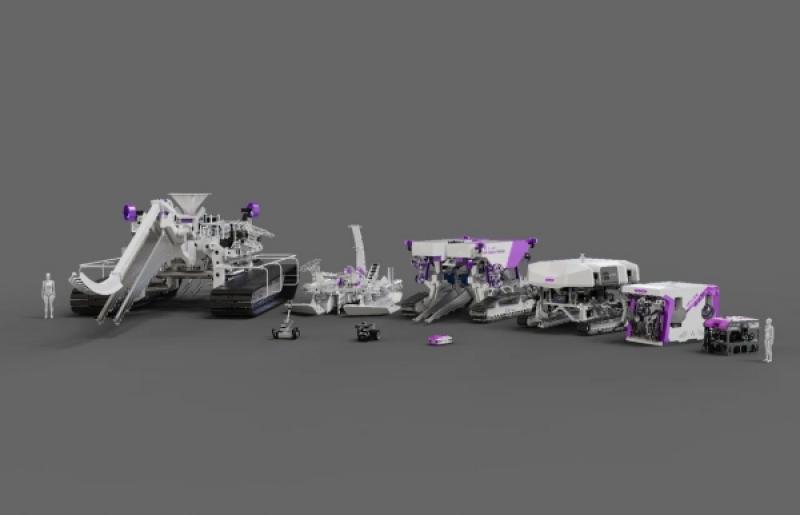
ICE Unity系统可部署于FET全系列ROV产品中,包括观测级、作业级、挖沟级等电动或液压驱动的水下机器人。公司承诺将持续进行技术开发,确保系统与最新传感器和工具设备的兼容性。
目前,FET的ROV设备已广泛应用于全球多个水下作业领域,涵盖国防、传统能源与可再生能源、通信、采矿、水产养殖及学术研究等行业。
推动水下作业智能化,FET以技术创新响应多元产业需求
随着海洋资源开发、水下基础设施建设及科研探测需求的不断提升,ROV作为关键工具,其控制系统的高效性、灵活性与智能化水平直接影响作业效能。ICE Unity的推出,正是FET对市场需求的精准响应。
传统ROV控制系统通常依赖本地操作台,人员需在现场进行监控与干预,限制了作业半径与响应速度。而ICE Unity通过强化网络连接能力,实现了“去中心化”控制,操作人员可在陆地控制中心、甚至通过互联网远程接入系统,完成对水下机器人的实时操控与数据分析。
这一功能在深水作业、危险环境作业或跨国项目中显得尤为重要。例如,在海上风电场的电缆铺设过程中,工程师无需常驻海上平台,即可通过ICE Unity系统实时监控ROV状态,调整作业路径,显著提升安全性与作业效率。
此外,统一的用户界面设计也解决了多型号ROV协同作业时的操作壁垒。在过去,不同级别或功能的ROV往往配备独立控制系统,操作人员需接受多次培训。ICE Unity通过标准化界面,实现“一次学习、多机操作”,降低了企业的人力成本与培训周期。
智能化运维成为亮点,预测性维护或重塑行业标准
ICE Unity不仅关注实时控制,更在系统维护方面引入智能化元素。通过内置的机器学习算法,系统能够分析设备运行数据,预测零部件损耗趋势,并在故障发生前提示更换建议。这种基于状态的维护策略,相比传统的固定周期维护,更加精准高效,可有效避免因突发故障导致的项目中断与损失。
Kevin Taylor指出:“在深海或复杂水域中,维修一次ROV的成本极高,不仅涉及设备本身,还包括船舶调度、人员派遣等间接支出。ICE Unity的预测性维护功能,将帮助客户实现从‘被动维修’到‘主动管理’的转变。”
适应多场景应用,FET布局可持续能源与新兴市场
值得一提的是,FET在发布中特别提到ICE Unity系统适用于“传统与可持续能源”领域,这反映出公司正在积极拓展可再生能源市场。随着海上风电、潮汐能等清洁能源项目的快速发展,对高性能ROV的需求持续增长。ICE Unity的兼容性与可扩展性,使其能够适配多种作业场景,包括风电基座检测、海底电缆巡检、养殖网箱清理等。
此外,系统在矿业、 水产养殖、科研等非油气领域的应用,也显示出FET正在推动ROV技术向更广泛的产业渗透,降低对传统油气行业的依赖。