海上风电场建设之前,相关海域海洋基础资料对风电场规划、设计、施工及运维至关重要,需要对拟铺设的海底电缆进行扫海测量。航海保障部门拥有与风电场建设相关的基础资料,如沿海港口航道图、水下地形、港口、助航标志、锚地、航行障碍物等资料,拥有专业测量船、专业技术人员、北斗CORS参考站、长短期水位站等,具备勘察扫海的综合能力。
海上风电场竣工后,相关航海图书资料更新迫在眉睫,海底电缆路由勘测、风力发电机的定位、风电场附近水域航行障碍物测量、风机基底冲刷监测成为海事通航尺度核定测量重要内容,海上风电场地理信息综合服务对保持航海图书现势性、保证船舶航行安全、保护风电场方利益具有重要意义。
一、关键技术
⒈侧扫声呐探测技术
采用声学换能器发射与航向正交的扇形波束,对海底进行扫描,接收海底回波信号,利用侧扫声呐对海底进行扫描,搜寻海上风电场影像数据记录。现场发现目标后,结合相邻测线或不同方向测线进行确认,量取目标尺寸、阴影长度,获得目标的初步位置和走向,并初步判断目标的性质。
⒉浅地层剖面探测技术
浅地层剖面仪包含甲板单元和水下单元,浅剖系统发射线性扫频调制脉冲,由水听器线列阵接收声反射信号,生成海底高分辨率图像。通过脉冲压缩滤波,由此产生海床高分辨率地层图像。将测量结果标注在海图上,包括海缆路由、涉水深度、升压站、风机点位、地层图像等。
⒊多波束水深测量
根据任务要求、多波束测深系统性能和测区概况布设计划测线,完成船舶动态吃水检定、潮位观测、声速测量、仪器校准、数据采集等外业工作。内业数据处理采用CARIS软件的HIPS模块,且采用CUBE算法对各传感器数据进行处理,对水深数据设定合理的过滤参数,删除假信号。数据检查后,把数据直接从HIPS软件里直接进行第一次抽稀,导出XYZ文件,数据处理流程如图1所示。在HYPACK软件中进行第二次抽稀形成最后数据。
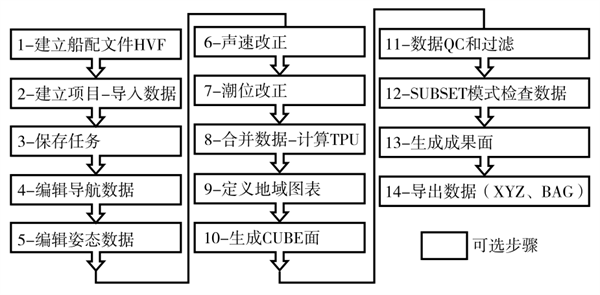
图1 基于CUBE的多波束数据处理流程
⒋二三维一体化展示技术
三维场景下实现海上风电场水上目标视频数据、水下目标视频数据、海底缆线分布、风机分布等数据的整合,结合广州海事测绘中心地理信息基础资料,提供二三维一体化海洋全要素管理信息服务,在三维场景展示风电场海域相关要素。
二、通航要素探测
海上风电场周围存在各种潜在障碍物,如沉船、岩石、沙洲等,这些障碍物可能对船只航行造成安全隐患。因此,通过使用侧扫声呐、浅地层剖面仪、多波束测深仪等工具,对海底进行扫海测量,可以获取风机及海底电缆信息,及时标注障碍物的位置和特征。图2中东西走向的虚线为沿海内航路,圆圈为验潮站,港口镇东边虚线为海上风电场范围及海底电缆路由。
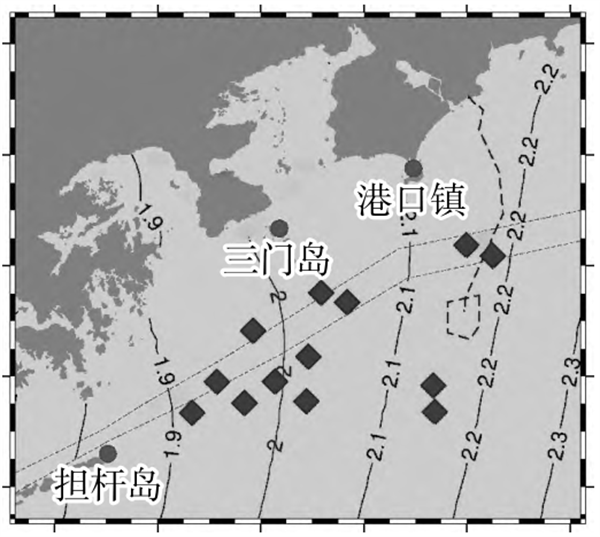
图2 扫海测量范围及潮汐类型
⒈沉船扫海测量
为保证通航安全,对风电场及内航路附近的13个沉船概位进行扫海测量,图2中菱形表示扫海测量范围,所处区域水深为30~40m。使用多波束和侧扫声呐两种声学设备,采用基于潮汐模型与余水位监控法进行潮位控制,按照沉船概位附近5km×3.5km海域进行全覆盖探测,并对图像判读。1~4号沉船的侧扫声呐和对应的多波束影像如图3所示,通过影像图获取沉船的特征。
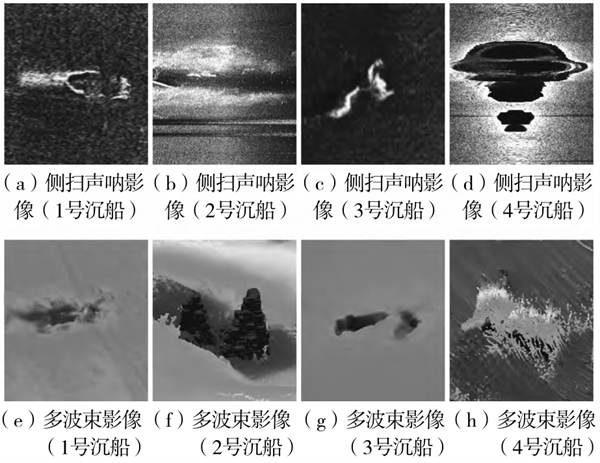
图3 沉船侧扫声呐和多波束影像
⒉礁石浅点探测
采用多波束全覆盖扫海测量进行海底水深扫测,采用侧扫声呐对海底地形进行全覆盖扫描工作。实测水深显示:电缆路由地势变化缓慢,较为平坦,但发现2处明显浅点,路由避开浅点,测量时考虑船舶航行安全,近岸根据现场情况测至能测区域,近岸最浅水深为3.2m,测区水深在3~40m,根据水深数据更新海图《红海湾至担杆岛(83001)》。
⒊风机基底探测
利用多波束测深仪对图2港口镇东边虚线范围内的风机基底进行扫测,同时使用多波束自带侧扫声呐功能进行数据记录。不同风机、升压站基底的侧扫声呐和多波束影像图如图4所示,通过影像分析风机基底保持状态和冲刷情况。根据水深判断,冲刷深度在0.1~3m不等。
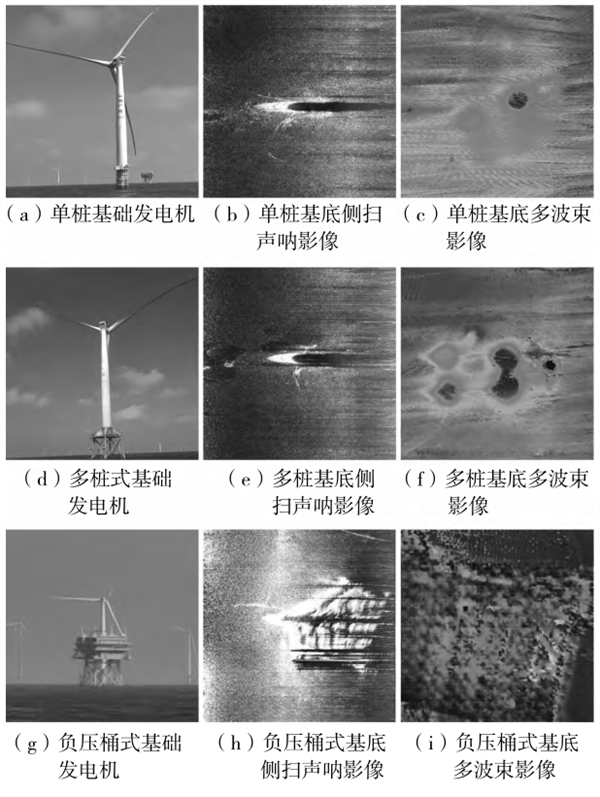
图4 风机基底侧扫声呐和多波束影像
⒋海上风电场电缆数据采集
使用浅地层剖面仪对图2所示海底电缆路由进行断面测量,发现管线埋深基本在1~4m不等,平均埋深为2.23m。内业处理采用SonarWiz软件,首先导入数据,对数据进行增益等参数调整设置,使图像更容易判读;然后发现目标进行打标,本次测量按照200m一个断面进行测量,共测量429处有效目标点,最终导出坐标。部分线缆在不同埋深处的浅剖和侧扫声呐影像如图5所示,扫测范围内近岸处比较复杂,渔网及礁石较多,部分区域无法进行扫海测量。
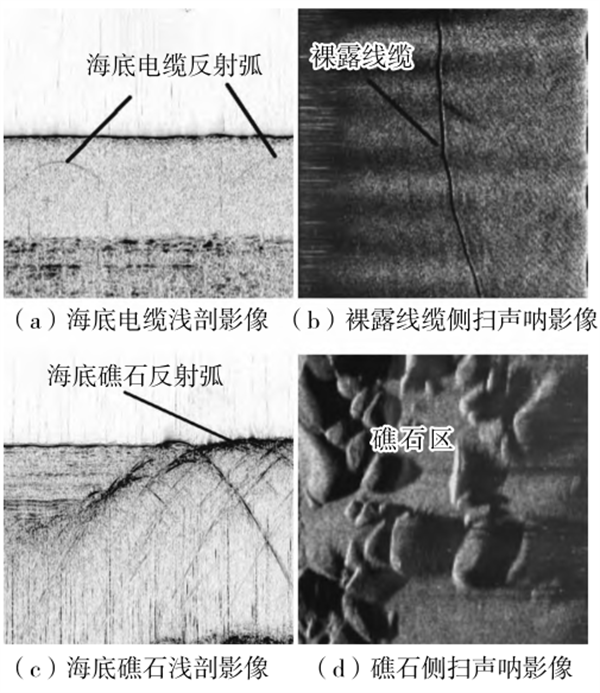
图5 海底电缆、礁石浅剖和侧扫声呐影像
三、质量控制
在沉船扫海测量时,采用Reson SeaBat T50-P多波束系统自带侧扫声呐功能代替常规尾拖式侧扫声呐,固定安装能快速、准确得到沉船姿态和位置信息。从3个不同方向反复扫测疑似沉船,拼接不同航迹的侧扫声呐影像,完整清晰地获取沉船主体及周边环境信息。
海上风电场电缆数据采集时,选择海况较好的窗口期,减少船舶摇摆幅度。严格控制船速在4~5kn,减少低频端的噪音。实测与设计线路会偏移,根据图2海缆路由设计坐标进行探测,测量结果发现,海缆路由实测走向与设计走向基本吻合,个别拐角处受水流及风浪影响,产生一定位移,图6显示2处偏差较大地方与设计位置偏差超过100m,其他地方基本吻合,根据实测数据制作路由线缆图和水深图。

图6 海底电缆实测与设计线路偏移
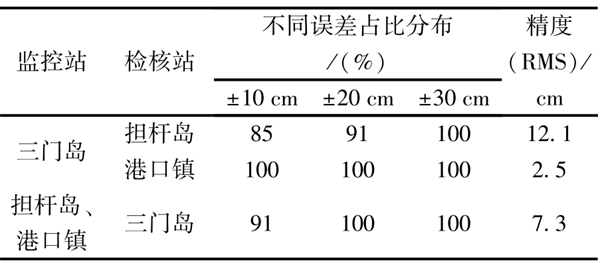
多波束水深测量水位控制采用基于潮汐模型与余水位监控法,测区无阻隔、无径流影响,总体综合预报中误差RSS为4.7cm,潮汐模型与余水位监控法具有适用性。采用回归分析法、同步改正法传递短期验潮站平均海面值,差值均不超过10cm,采用4个主分潮与L值比值法、潮差比法传递深度基准值,差值均不超过15cm,评估结果见表1,余水位差异统计见表2。以担杆岛、三门岛、港口镇3个水位站作为余水位监控站,水位插值精度高于表2中仅1~2个水位站作为余水位监控站的精度,符合规范要求。
表1 短期站平均海面、深度基准面精度评估
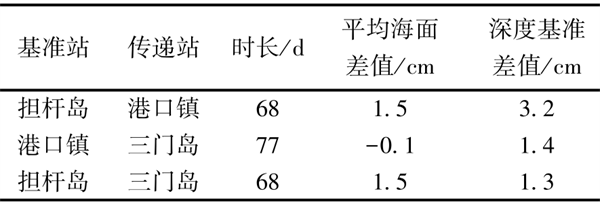
表2 余水位差异统计
四、二三维一体化
以风电海域空间数据库为基础,集成水上部分遥感影像,建立海洋数据的分析和应用模型,实现海洋要素、海洋过程、海洋预报的多维、动态、可视化表达,利用二三维一体化技术,为海洋科学研究和行业内应用提供二三维信息可视化服务。三维可视化平台可展示风电场海域水上水下一体化的地形地貌模型、港口设施、标志性建筑三维模型等,提供直观立体的水上水下三维立体景观;通过实时访问南海基础地理信息数据库和专题要素数据库,在可视化环境下展示码头、航标、障碍物、水上水下设施、锚地等通航要素,在专题数据库基础上实现统计、分析、查询等功能,提供风电场海域二三维在线综合要素管理信息服务。风电场通航要素及地形地貌模型展示如图7所示。
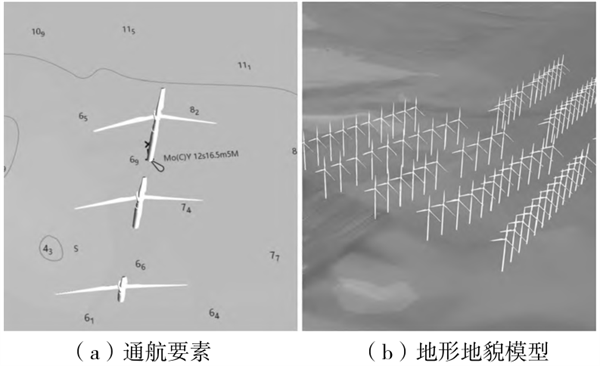
图7 风电场海域二三维一体化展示
五、结论
⑴海上风电场水域远离陆地,多波束扫海测量需要进行准确的水位控制,基于潮汐模型与余水位监控法能减少水位控制成本,采用少数水位站控制大范围风电场水域潮位,满足水深测量要求。
⑵风电场附近沉船扫海测量范围巨大,外业测量产生海量多波束数据,CUBE算法对海量多波束处理具有潜在应用价值,能明显提高内业处理效率,滤波后应检查回看,及时恢复被误删的真实信号。
⑶海上风电场电缆数据需要结合浅剖和侧扫声呐、多波束影像综合分析,根据浅水礁石、管线的影像特点,结合设计位置判读电缆数量和走向,提高数据的互补性和可靠性。
⑷电子海图上的沉船一般是历史沉船,坍塌在海底,明显的船型难以出现在多波束和侧扫声呐影像中,沉船附近水域深30~40m,使用采泥器难以进行底质探测,准确判读存在难度,磁法测量、下潜探摸和水下摄像判读可获取更多沉船信息。
【作者简介】 文/何志敏 姚薇 王华强 张润达 何民华 梁杰华,来自交通运输部南海航海保障中心广州海事测绘中心。第一作者何志敏,1982年出生,男,硕士,高级工程师,从事海洋测绘工作。本文受基金项目赞助,广州海事测绘中心创新工作室2023年课题研究计划(2023-6)。文章来自《测绘通报》(2024年S1期)