雷达站用于监控海洋平台海域航道的船舶运行状况,维护海上交通秩序,确保航道安全,可为海上交通提供信息和服务帮助。雷达传感器将采集的信号发送至雷达站,雷达站将采集的信号传输到监控中心,从而控制监控区域。该系统的主要功能为:加强监测和控制该海域的船舶通航管理;监视跟踪雷达站区域内的目标;防止和减少海上交通事故;提高沿岸港口的生产效率;为船舶及相关的单位提供信息服务;记录跟踪雷达视频和操作状态数据,并在电子海图背景下重放和分析交通。
1、雷达站的组成
雷达站由X波段天线、旋转单元、波导、X波段双雷达收发机、雷达跟踪处理器、服务器、键盘、交换机等设备组成。雷达天线是高分辨率、裂缝波导、X波段水平极化天线,雷达天线与双X波段收发机相连,收发机为低噪声双收发机冗余配置,雷达跟踪处理器执行雷达数据处理功能。服务器同时控制收发机和跟踪处理器。雷达站将采集的数据通过网络接口传送到控制中心。
2、雷达站的作用
雷达传感器将采集的信号传输到控制系统,将来自雷达回波跟踪海域范围内船只的航行状态整合显示到上位操作站,操作人员可以清晰、直观地掌握海面船舶运行状况,如图1所示。需要时,可对船舶喊话。万一发生海上交通事故,那么系统中的记录回放可以作为依据,以便后续处理。
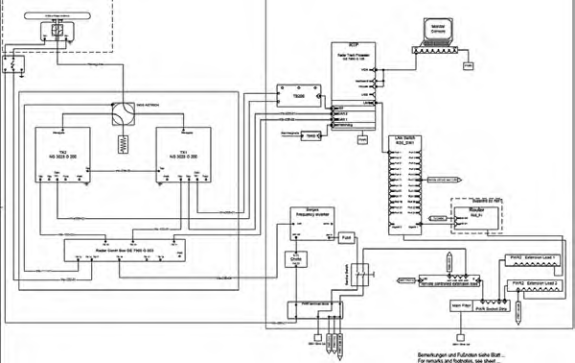
图1 雷达站系统框图
3、雷达站各部件性能指标及用途
3.1 天线技术参数
频率:(9375±30)MHz。偏移:水平。增益:(36±0.5)dB。水平波束宽度(-3dB):<0.38°。垂直波束宽度(-3dB):14°±2°。旁瓣水平抑制:within±5°-27dB;outside±5°-30dB。旋转速度:20rpm。电源:3ph,50/60Hz,380V。风速:40m/s(操作),55m/s(最大)。防护等级:IP54。
3.2 旋转单元
雷达天线安装在旋转单元上,可以控制2台雷达收发机的波导开关;波导开关可以关闭2台雷达收发机,旋转单元的电源线连接机柜中的电源控制器。
3.3 波导
波导用于连接天线与收发机信号传输。
3.4 雷达收发机
雷达收发机由循环器、磁控管、接收器、放大器、收发控制单元(TCU)、电源输入单元、电源和RF限制器组成。雷达站配置双X波段雷达收发机,包括2台单收发机,每台单收发机由共同的波导开关及天线波导相连接,天线控制信号(包括波导控制)由连接模块连接至雷达收发机,雷达收发机有内置射频灵敏时间控制(RF-STC)和脉冲重复频率功能。收发机与雷达跟踪处理器接收复合视频信号,复合视频包括模拟视频、方位角等信息,处理后的信号通过CAN-Bus接口远程控制和监控。雷达收发机内置测试功能。如果出现故障,则可以通过CAN-Bus接口传输至雷达跟踪处理器,再传输至VTS控制中心。任何当前状态的改变都会提醒操作员,以引起他们的注意。
3.5 雷达接收机技术数据
频率(标准):(9375±30)MHz。峰值脉冲功率(磁控管):10kW。脉冲宽度:在50~1000ns射程内。脉冲重复频率:在500~4000Hz射程内。开始/停止设定:在360°内。消隐脉冲宽度:0~359°。消隐分辨率:0.1°。
3.6 接收器
限制器、调音器、前置低噪麦克风RF前置扩音器噪音系数:≤3.5dB。扩音器中央频率:60MHz。带宽:20MHz/6MHz。RX-动态范围:≥125dB。接收器抑制镜频信号能力:20dB。
3.7 控制单元
天线马达的功率来自电源控制单元,主要功能是控制天线马达和雷达收发机功率的开/关,包括一个安全开关和旋转单元,以安全维护收发机功率。雷达收发机包括2个灵敏度时间控制(STC)盘,可以获得增加的动态范围。为了避免邻近雷达站或安装雷达的船只互相干扰,使用随机变化的脉冲重复频率,从而避免出现第二时间回波,能够保证操作站上回波的稳定性,操作员可以在监控操作站上分别设置起始和结束遮蔽的范围,此功能也可以通过远程控制实现。
3.8 雷达系统接口
雷达视频接口是一模拟复合视频接口,包括视频、方位角等信息。物理接口是一个同轴电缆连接的接口。远程控制包括STC控制、脉冲宽度、开/关功能等。另外,校准方位和距离、遮蔽范围等也可以由远程控制实现。因此,高精度的参考点是实现各项功能准确性的必要条件。远程控制是一个CAN-Bus接口。雷达远程控制、雷达回波校准和传输遮蔽控制、雷达状态和雷达误差均经由此接口传输。
主群功率接口包括旋转单元、电源和安全开关。按下安全开关可以切断旋转单元与收发机电源,以进行安全维护工作,这个安全开关必须用钥匙打开。在维修工作中,维修人员必须保存好钥匙。
3.9 雷达跟踪处理器
雷达跟踪处理器其实是一台工业用计算机,装有数字信号处理器,它是雷达的接口板。目标录取和跟踪都是实时进行的,即连续记录雷达旋转所有信息,但大约有几秒钟的延迟。雷达跟踪处理器利用广域网传输雷达视频,将跟踪数据和状态数据送至雷达站控制中心。相应地,控制中心的命令、遮蔽图等信息也会传输到雷达跟踪处理器,从而进入整个原始雷达视频。
本地跟踪器决定雷达站控制系统内所连接的雷达传感器的跟踪能力和性能,可靠的本地跟踪是成功跟踪的前提。多传感器跟踪的集成依靠多路跟踪器的跟踪功能实现,由多路跟踪器将系统的跟踪数据传递给雷达站操作员,操作员可以在雷达站中心远程控制雷达跟踪处理器,该操作通过数据传输网络完成,能够更好地实现本地维修。
4、显示单元
每个雷达站配置一台维修终端用于监视及控制功能,如显示雷达视频、偏心、增益、动态、STC、脉宽、收发机的选择等。另外,还可以调整磁控管状况、脉冲重复频率、STC曲线。
5、雷达站信号传输
远距离信号传输一般可采用以下3种通信方式。
5.1 微波通信
微波通信在空间为直线传播,其传播距离受到限制,最大传播距离为100km。在一条微波通信信道的2个终端之间建立中继站,中继站将信号放大后可以将信号传输到陆上终端,但其投资费用大,施工也有一定难度。
5.2 卫星通信
卫星通信的频率带宽很大,信号稳定,但是租用卫星公司的带宽为按月收费,投资费用很大。
5.3 光纤通信
光纤通信是指利用光导纤维传递光脉冲来进行通信。由于可见光的频率非常高,所以光纤通信系统的传输带宽远大于目前其他各种传输的带宽,是成熟的远距离传输媒体。综上所述,从投资费用和施工工作量来看,光纤通信是较为理想的方案。
6、结语
在海上平台设置雷达站后,操作人员能探测海上平台移动目标和识别的来源,可根据目标的运行轨迹、所处位置、航向航速等参数判断雷达扫描范围内的船只往来,从而确保该海域航道移动船舶的安全。来源 | 本文原刊于《天津科技》;2024年4月作者 | 莫儒志 于成龙 潘建 中海油湛江采油服务文昌分公司