作为一种绿色环保的可再生资源,海上风力发电具有重要的发展前景,可大大减少人类对化石燃料的依赖。风机基础结构简单,占用面积小,承载能力高,沉降量小,因此适用范围广泛。风机基础直接与大直径装机相连,所处的海洋环境复杂,在波浪潮汐作用下会在桩基周围产生马蹄形漩涡和漩涡脱落,常常导致桩基周围土体受到冲刷。冲刷侵蚀作用影响其地基的稳定性,桩基受到微小变形即可引起上部风机的倾斜晃动,从而影响风机的正常运转。因此对海上风机冲刷进行监测,对评估风机基础稳定性与安全性具有重要意义。
由于水下环境复杂,难以对风机基础的冲刷现状和安全隐患进行精细化探测,常采用基于声学原理的多波束测深技术和三维声呐图像扫侧技术,获取目标物的三维图像,高效检测水下构筑物的现状。多波束声呐系统不仅可以绘制高分辨率的海底地形图,且能同时利用海底反向散射强度绘制声呐图像;多波束图像具有分辨率低、图像质量差、随机干扰因素多、不直观、可读性差及无法实时比对等缺点。二者都是采用声学方法,通过向海底发射接收声波进行海底测绘,但二者的侧重点不同,在处理方法上存在较大差异。
鉴于二者存在一定的互补性,国外学者很早就开始了这两套系统组合的可能性和优越性方面的研究,并取得了一定的效果。本文拟综合应用实时三维成像声呐系统和多波束扫测系统,对海上风电基础冲刷情况进行检测,对其周围冲刷情况进行动态监测,为风机基础冲刷防护提供数据支撑,进而为风机基础的安全性、稳定性评估工作提供新的技术手段。
一、仪器设备和测试方法
⒈多波束水深测量
水深测量采用Sonic2024型号多波束测深仪;定位采用天宝DGPS接收机,接收RBN-DGPS台站发布的RTCM104(2.0)标准差分信息,进行实时差分定位;导航及测深数据采集采用Qinsy8.0系统软件。
多波束的换能器采用舷侧安装。固定后量取换能器探头、GPS天线、运动传感器与船重心的相对位置关系,实时对运动中换能器探头、GPS天线位置的变动进行姿态改正。
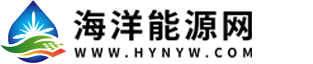
测深作业时,采用RBN/DGPS定位系统与Qinsy8.0测量软件组成的水深测量数据自动化采集系统,进行导航定位和多波束水深数据采集。共布设1个测线文件,风机周边测线以风机为中心,按“井”字形进行布设(如图1所示),测线间隔以测区全覆盖为原则,根据现场水深情况适当调整,保证覆盖风机基础周边各50m的范围。
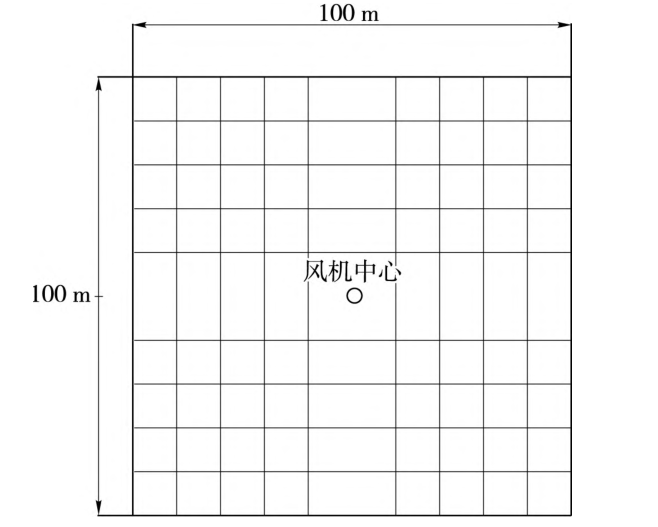
图1 测线布设
⒉实时三维声呐测量
本次勘测使用EchoscopeC500实时三维成像声呐。设备安装与多波束类似,声呐探头采用不锈钢支架固定安装于船体左舷,位于距离船头约1/3处,并采用不锈钢管前后带缆的方式作为辅助。打开Underwater Survey Explorer软件的采集设置模块,设置外业采集的通信及坐标系统等参数,调整声呐的采集参数,直至获得真实海底。经测试,实时三维声呐系统正常工作。
风机和升压站基础的三维扫测以桩为中心,在桩的四周布置4条离桩中心距离为15m的计划测线(如图2所示)。图中为计划测线,测量过程中需根据当前水深情况调整测量间距和探头朝向,以保证扫测结果能够完整呈现出桩四周的情况。
图2 测线布设
二、应用实例
试验选取广东某海上风电场某风机组,距陆域最近距离约10~15km,机位水深约-9~-3m,风机基础型式为6.5m直径单桩,风机基础采用砂被保护型式,保护范围为35m×35m;升压站基础型式为4根单桩导管架,无防冲刷保护,水深约-8m。为了评估海上风电桩基础的稳定性和砂被保护效果,以及评估基础稳定性和安全性,采用多波束扫测系统和三维成像声呐系统对风机基础和升压站基础冲刷进行勘测。
⒈检测风机基础冲刷
以风机外围平坦海床高程为标准,以风机周边地形比平坦海床低0.5m处作为冲刷坑外边缘,4个方向取平均值作为冲刷范围半径。通过对多波束扫侧系统采集数据进行声速剖面校正、潮位改正后,得出风机基础周围水深平面图(如图3所示)和三维图(如图4所示)。
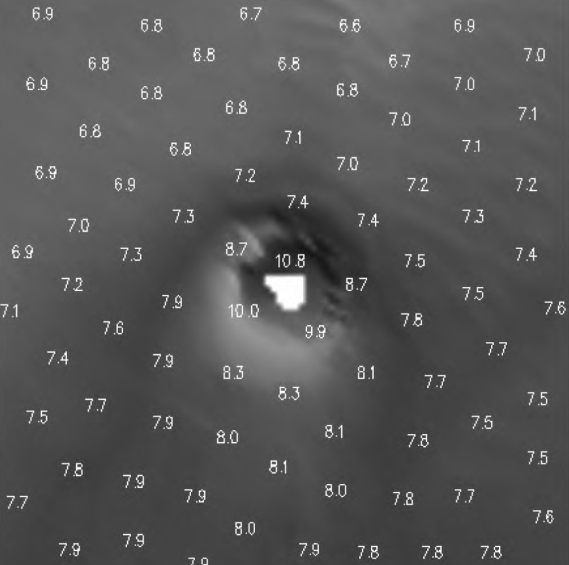
图3 风机基础周围区域水深
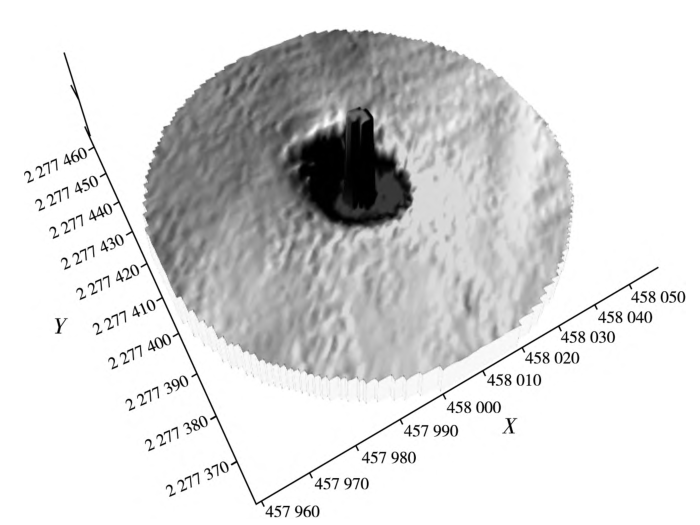
图4 风机基础周围区域三维地形
可以看出,在距离机位中心半径35~50m范围内,海底地形较平坦,高程变化较小,海底高程范围为-8.0~-6.5m,平均高程为-7.32m;距离距风机中心半径35m范围内,海底高程范围为-11.0~-6.8m,平均高程为-7.89m,可明显发现在风机基础周围地形高程低于周边区域,发生明显的冲刷。
图5为风机基础周围区域地形剖面图。可以看出,主要的冲刷区域发生在风机基础周围10m范围内,具有明显的冲刷坡,最大坡度为45°,超出风机基础周围10m范围后,冲刷坡度很小,冲刷效果不明显。以风机中心为圆心,35m半径范围内最大水深与最小水深相减得到风机周边的最大冲刷深度,及风机基础的最大冲刷深度。最大冲刷深度发生于风机基础的北方向,为5.5m,其余3个方向冲刷深度为4.5~5m。根据对风机基础周围的多波束扫侧结果可得,风机基础周边的防冲刷的主要区域应该位于风机基础周围的10m范围内,尤其对风机基础的北向范围进行重点的防护,在风机基础运营期通过定期对风机基础周围区域地形进行定期监测,可获得风机基础冲刷的效果,以采取相应的冲刷防护措施。
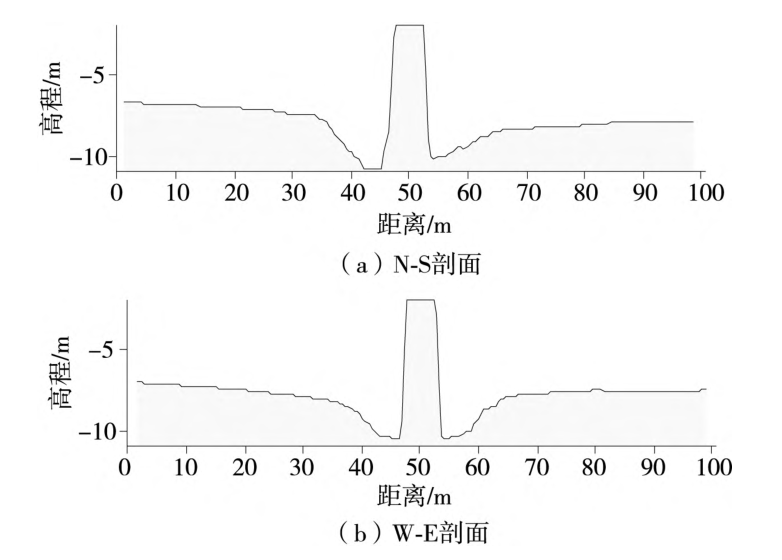
图5 风机基础周围区域地形剖面
⒉检测海底电缆冲刷
采用三维声呐扫测技术对风电基础周围进行扫测,结果如图6所示。可以看出,风机北侧有3个海缆喇叭口,共有3根电缆引出。右侧海缆喇叭口引出的电缆①沿北偏东方向延伸入泥,中间海缆喇叭口引出的电缆②,从电缆③底部穿过后沿西北方向延伸入泥,左侧海缆喇叭口引出的电缆③,从电缆②上方通过后沿北方向延伸入泥;同时可以看出,风机基础周围有较明显的砂被防护痕迹,风机周边存在较为明显的冲刷坑,风机北侧冲刷深度最大,三维声呐成果与多波束成果一致。
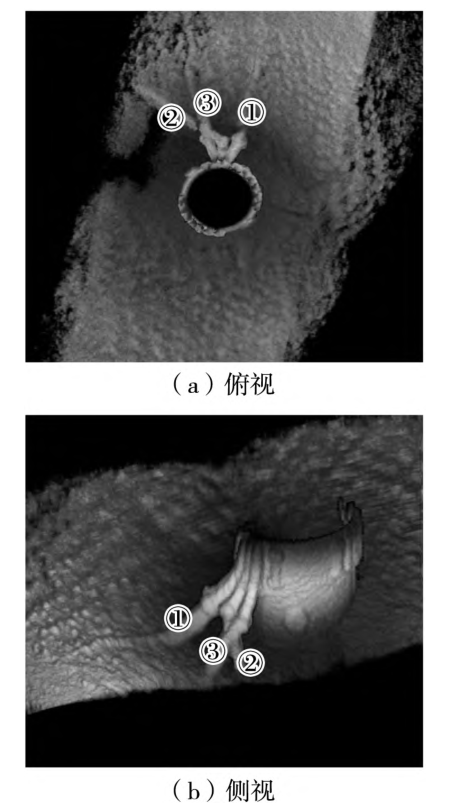
图6 风机基础三维扫测
对风机基础三维扫测数据进行分析可得电缆悬空长度和电缆裸漏长度。电缆悬空长度为电缆悬空段在水平面投影的长度,电缆裸漏长度为电缆裸漏段在水平面投影的长度。数据分析可知,电缆①悬空段长度为2.94m,最大悬空高度为0.41m,电缆裸漏长度为4.07m,海缆从喇叭口出来至入泥点之间的裸漏悬空长度共为7.01m;电缆②悬空段长度为2.58m,最大悬空高度为0.06m,电缆裸漏长度为3.19m,海缆从喇叭口出来至入泥点之间的裸漏悬空长度共为5.77m;电缆③悬空段长度为6.96m,最大悬空高度为0.48m,电缆裸漏长度为3.55m,海缆从喇叭口出来至入泥点之间的裸漏悬空长度共为10.51m。
利用三维成像声呐技术对风机附属电缆冲刷情况进行检测,可以清晰看到海底电缆安装状态和在水下的敷设环境,可为风机附属电缆后期维护和悬跨处理方案设计提供依据。
⒊检测升压站基础冲刷监测
由于升压站基础周围电缆较多,海底水域情况复杂,采用常规手段难以对其敷设状态和水下环境进行精细化探测,而采用三维成像声呐技术可准确掌握水下工程现状。采用三维声呐扫测技术对升压机基础周围进行扫测,结果如图7所示。升压站基础未采取防护措施,由三维扫测成果可以看出,升压站基础相对于外围平坦海床存在冲刷,由于升压站的占地面积较大,周边冲刷范围相对较大。对照两次三维测图(相隔6个月)可以看出,升压站框架结构的底部横梁与海床之间高差变大,横梁与海床之间的间隙由0.5m增至1.5m,不考虑升压站的整体沉降,两次测量期间升压站底部海床冲刷深度为1m。
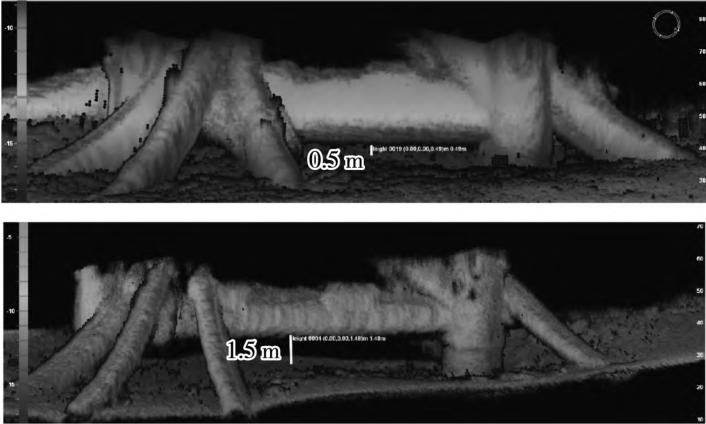
图7 升压站冲刷深度变化对比
三、结论
通过合理布设测线、人工操控的调查方式,实现多波束和三维声呐的综合应用,可安全高效地对复杂水下环境下风机基础和升压站基础冲刷情况进行监测,试验结果表明:
⑴多波束测深系统可获取风机基础的平面位置,通过对测深数据进行三维建模,实现三维可视化,更加直观详细了解风机基础周围冲刷范围半径,以及最大冲刷深度与冲刷现状等信息,为风机基础的防冲刷维护提供数据支撑。
⑵三维声呐扫测技术可呈现风电基础周围海底地形的高分辨率的二维平面图像,可直观掌握风机附属电缆的敷设状态、量化确定电缆悬空长度、电缆裸漏长度,以及升压站基础的冲刷状态的动态监测,可为风机附属电缆后期维护和悬跨处理方案设计提供依据。